В корзине пусто!

 391 96 78")
Мягкая роботизированная рука использует датчики и ИИ для предотвращения выскальзывания предмета
Многие роботизированные руки хорошо справляются с захватом предметов, но приспособиться к предметам, которые могут выскользнуть может быть непросто. Томас Турутел из Университетского колледжа Лондона и его коллеги создали простую мягкую роботизированную руку, которая может предотвратить выскальзывание объекта, используя только движения запястья.
Они начали с создания человекоподобной руки, используя 3D-печатный скелет из пластика и мягкий силиконовый материал. Чтобы имитировать то, как человеческая кожа ощущает давление, они добавили 32 датчика на ладонь и пальцы. После чего они соединили кисть с подвижной рукой с мотором в запястье. Все датчики были подключены к компьютеру для сбора показаний.
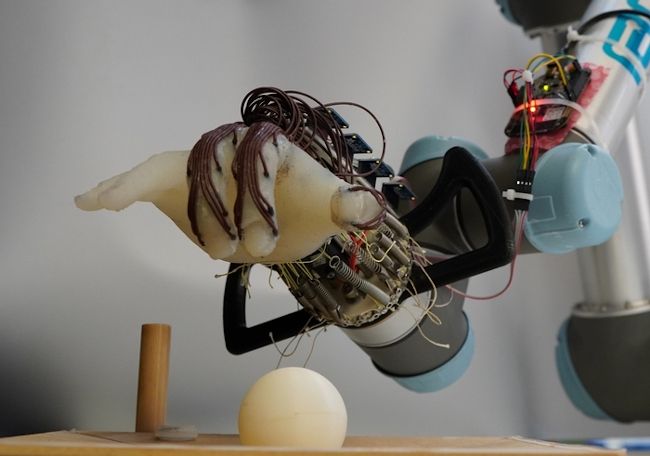
Чтобы обучить руку, исследователи опускали ее на различные предметы, а затем пробовали разные движения запястьем, которые заставляли пальцы двигаться вокруг предметов, захватывать их и поднимать. Первоначально робот обучался на маленьких пластиковых шариках, напечатанных на 3D-принтере, и хватал их, используя заранее определенные действия, полученные в результате демонстрации человеком. Турутел говорит, что даже с неподвижными пальцами, после более чем тысячи попыток рука смогла надежно схватить 11 из 14 случайно выбранных бытовых предметов, в том числе персик, компьютерную мышку и т.д.
Чтобы справиться с выскальзыванием предметов, они обучили ИИ на основе показаний датчиков как успешных, так и неудачных попыток захвата. Программа научилась распознавать момент выскальзывания предмета и выполнять движения запястьем, чтобы предотвратить это. Под управлением ИИ рука успешно выполняла эту корректировку примерно в 79% случаев.
Роберт Кацшманн из Швейцарского федерального технологического института в Цюрихе говорит, что новая рука слишком проста и ограничена в движениях, чтобы имитировать различные способы захвата предметов человеческими руками, но эксперимент показывает, что небольшого количества информации может быть достаточно для того, чтобы система ИИ научилась различать различные способы удержания предмета. Он говорит, что этот подход к ИИ будет использоваться при работе над добавлением "чувств" к более сложным и ловким роботизированным рукам, которые создает его команда.






