В корзине пусто!
")

 391 96 78")
Четвероногий робот Pneupard делает свои первые шаги
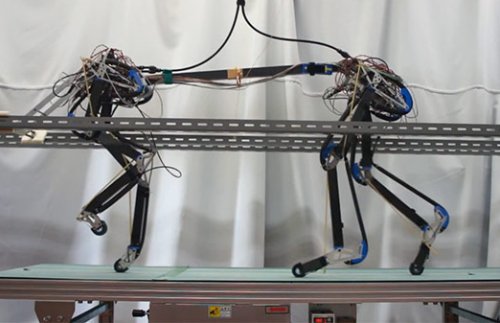
Наши постоянные читатели наверняка хорошо помнят робота Wildcat компании Boston Dynamics, который в прошлом году «вырвался» на свободу из застенок лаборатории и наматывал круги на автостоянке, двигаясь с впечатляющей скоростью в 25 километров в час. Но всем также известно, что робот Wildcat является далеко не единственным представителем семейства четвероногих роботов, конструкция которого вдохновлена строением тела реально существующих животных, еще одним примером тому является робот под названием Pneupard, разрабатываемый специалистами из университета Осаки, Япония.
Впервые о роботе Pneupard, приводимом в движение пневматическими «мускулами», стало известно около года назад. Но в то время робот еще не имел более-менее целостной конструкции, исследователи разработали только некоторые узлы и детали будущего робота. А в нынешнее время новый вариант робота, уже имеющий все четыре конечности, начал делать свои первые самостоятельные шаги.
Для того, чтобы реализовать функцию ходьбы робота Pneupard, специалистам из университета Осаки пришлось точно настроить давление воздуха, подаваемого в камеру каждого пневматического мускула. И это, с учетом большого числа пневматических приводов, потребовало весьма значительных усилий. Следует отметить, что в изначальной конструкции робота Pneupard планировалось задействовать гораздо большее количество пневмоприводов, но инженеры приняли решение сократить их число до необходимого минимума, пожертвовав некоторой частью гибкости и плавности движений робота, но значительно упростив алгоритмы управления движениями.

На приведенном ниже видеоролике четко видно, что у робота Pneupard практически отсутствует сложная система управления. Более того, имеющаяся система управления не использует датчиков, обеспечивающих работу обратных связей, она, на языке систем управления, построена на принципах разомкнутого контура. Требующаяся динамика движений конечностей робота получается в результате физического взаимодействия пневматических мускулов с механическими элементами конструкции, а всем этим управляет простейший контоллер ритма, называемый CPG (central pattern generator).
В настоящее время исследователи уже установили несколько датчиков на конечностях робота, которые должны немного расширить функциональность контроллера ритма. Это позволит исследователям увеличить эластичность движения конечностей и на лету переключать виды перемещения (походку) робота.
Исследователи полагают, что столь необычный подход к строению двигательного аппарата робота позволит им более подробно изучить все нюансы зависимости перемещения центра тяжести механизма от перемещения его конечностей. Это, в свою очередь, позволит им разработать более эффективные с точки зрения затрачиваемой энергии движения и более стабильные виды перемещений робота.






