В корзине пусто!

 391 96 78")
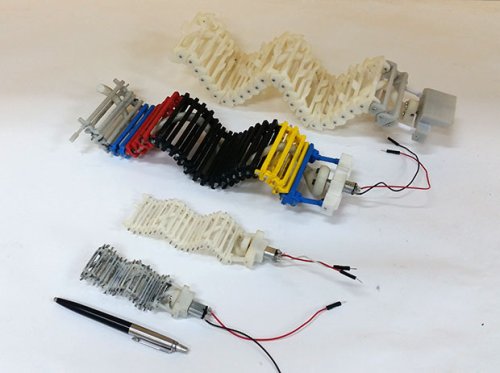
SAW – простейший робот, передвигающийся при помощи «бегущей волны»

Когда мы смотрим на огромное разнообразие созданных людьми роботов различных типов, в голову приходит мысль о том, что в этом деле уже тяжело придумать нечто совершенно новое. Однако, у группы исследователей из университета Бен-Гуриона, Израиль, возглавляемой Дэвидом Зарруком (David Zarrouk), есть, чем можно удивить наших читателей. И этим удивительным созданием является робот, способный достаточно быстро перемещаться при помощи единственного двигателя, который заставляет тело робота совершать синусоидальные колебательные движения.
Принцип движения робота, который получил название SAW, отличаются от принципов движения червей, которые передвигаются за счет череды сокращений и удлинений отдельных участков своего тела, так называемой продольной волны. Робот SAW передвигается за счет вертикальной волны, принципа движения, который используют рыбы, змеи, гусеницы и некоторые другие живые существа.
Конструкция робота SAW предельно проста. Его единственный двигатель вращает кривошипный механизм, заставляющий колебаться "хребет" робота, состоящий из множества скрепленных частей, напечатанных на трехмерном принтере. Поскольку колебания тела робота совершаются только в одной плоскости, он может передвигаться только вперед или назад. Для удержания двигателя, аккумуляторов и электронных узлов используется тележка с колесами, но эти колеса абсолютно пассивны, т.е. никак не связаны с двигателем.
В настоящее время самый большой и шустрый из роботов SAW может перемещаться со скоростью 57 сантиметров в секунду, что соответствует 5.6 длинам волн колебаний его тела. При такой организации двигательной системы может сложиться впечатление, что скорость движения робота зависит только от скорости совершения его телом колебательных движений. Однако, это немного не так, исследователям удалось повысить скорость движения на 13 процентов, добавив к его "хребту" некоторые дополнительные элементы.
В настоящее время израильские исследователи работают над тем, что бы получить возможность управления амплитудой и частотой колебаний, совершаемых телом робота SAW. Реализация этих функций не так проста, как кажется на первый взгляд, но они позволят роботу регулировать скорость своего движения и дадут ему возможность передвигаться внутри труб различного диаметра. Помимо этого, исследователи проведут исследования работоспособности принципов "волнового" движения в среде вязких жидкостей и на гладких скользких поверхностях. Ведь конечной целью исследователей является создание подобных сверхминиатюрных роботов, которые смогут выполнять некоторые полезные действия внутри человеческого организма, к примеру, внутри пищеварительного тракта.






